Robotyka, w tym także mobilna, rozwija się w ostatnim czasie dynamicznie, a roboty mobilne coraz częściej używane są̨ do wykonywania czynności wspomagających lub zastępujących działania człowieka.
Coraz powszechniejsze staje się̨ zastosowanie mobilnych robotów inspekcyjnych do monitoringu miejsc niedostępnych lub niebezpiecznych dla człowieka. Systemy rurociągowe są często spotykane w instalacjach przemysłowych, będąc jednocześnie obszarami krytycznymi, ze względu na problemy związane z oceną stanu ich konstrukcji. Często czynność ta, poprzedzona jest wyłączeniem z obiegu całego odcinka, co jest źródłem konkretnych strat związanych z przestojami produkcyjnymi, a sam proces inspekcji realizowany metodami tradycyjnymi jest kosztowny oraz w wielu przypadkach związany w koniecznością pracy w środowisku nieprzyjaznym, a nawet niebezpiecznym dla człowieka. To właśnie było motywacją do podjęcia prac nad opracowaniem mobilnego robota gąsienicowego, pozwalającego na prowadzenie inspekcji w różnych rurociągach oraz innych obiektach.
W wyniku przeprowadzonego przeglądu i analizy istniejących rozwiązań robotów przeznaczonych do inspekcji rurociągów pionowych lub poziomych stwierdzono, że nie istnieje konstrukcja robota, pozwalająca na jednoczesne dostosowanie się do ruchu na powierzchniach płaskich, w rurociągach poziomych oraz w rurociągach pionowych. Stąd decyzja naukowców AGH o podjęciu próby opracowania rozwiązania układu jezdnego robota z aktywnym systemem adaptacji do przestrzeni roboczej wraz z odpowiednim układem sterowania. Prowadzone prace koncentrowały się na zaprojektowaniu, stworzeniu modeli, opracowaniu układu sterowania robota, przeprowadzeniu symulacji oraz budowie i walidacji eksperymentalnej prototypu. W efekcie tych działań powstała konstrukcja robota oparta
o autorski, opatentowany mechanizm układu jezdnego, napędzany sześcioma serwomechanizmami, ustawiającymi pozycję i orientację dwóch modułów gąsienicowych. Tak korzystna konstrukcja pozwala na stosowanie jednego robota do inspekcji wizyjnej rożnego typu obiektów przemysłowych, w tym rurociągów o różnych kształtach i wymiarach, o orientacji poziomej i pionowej oraz do jazdy po równych i nierównych powierzchniach.
Na poniższym rysunku (rys. 1) pokazano model 3D oraz zdjęcie prototypu robota.
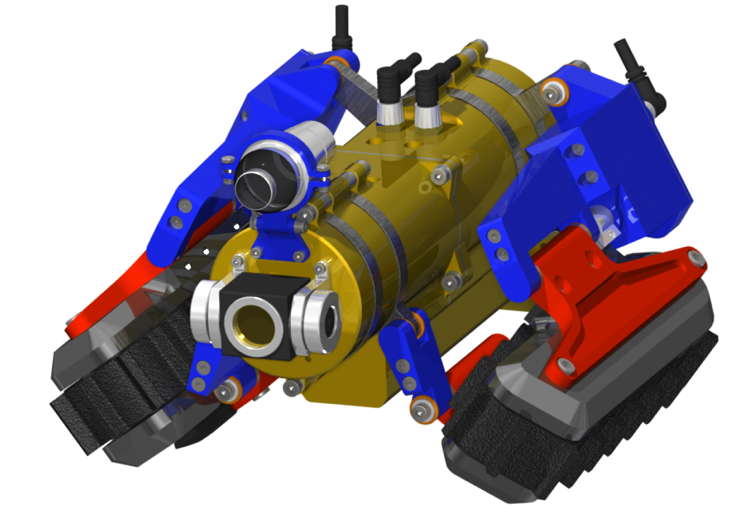
Rys. 1. Model wirtualny i fizyczny prototypu robota przed przeprowadzonymi testami.
Układ ruchu robota składa się z dwóch pedipulatorów o zamkniętym łańcuchu kinematycznym, sześciu przegubach obrotowych i trzech serwomechanizmach, pozwalających na zmianę̨ położenia i orientacji zintegrowanych gąsienicowych modułów napędowych. Łącznie robot posiada osiem napędów, z czego cztery umieszczone są̨ wewnątrz korpusu i napędzają̨ współosiowe pierścienie obrotowe poprzez przekładnie zębate, dwa umieszczone są w ramionach zewnętrznych pedipulatorów, a dwa silniki napędzają̨ moduły gąsienicowe. Konstrukcja robota wykonana jest w większości z elementów aluminiowych oraz ze stali nierdzewnej, zapewniających ochronę̨ przed korozją, a wszystkie złącza są uszczelnione, aby umożliwić działanie w środowisku wodnym. W projekcie robota zastosowana została kamera analogowa CCTV o szerokim kącie widzenia ze zintegrowanym oraz dodatkowym oświetleniem.
Zasadnicze parametry robota prezentują się następująco:
- mechanizm napędowy oparty o dwa moduły gąsienicowe oraz sześć serwomechanizmów pozycjonujących gąsienice
- możliwość pracy w rurach o przekroju okrągłym o średnicy D≥210 mm
- możliwość pracy w rurach o przekroju prostokątnym i na powierzchniach płaskich
- możliwość pracy w rurach pionowych o średnicach w zakresie 225÷260 mm
- masa własna robota: 7 kg
- wyposażenie w kamerę CCTV wraz z oświetleniem czołowym 900 lumenów
- stopień́ ochrony IP67
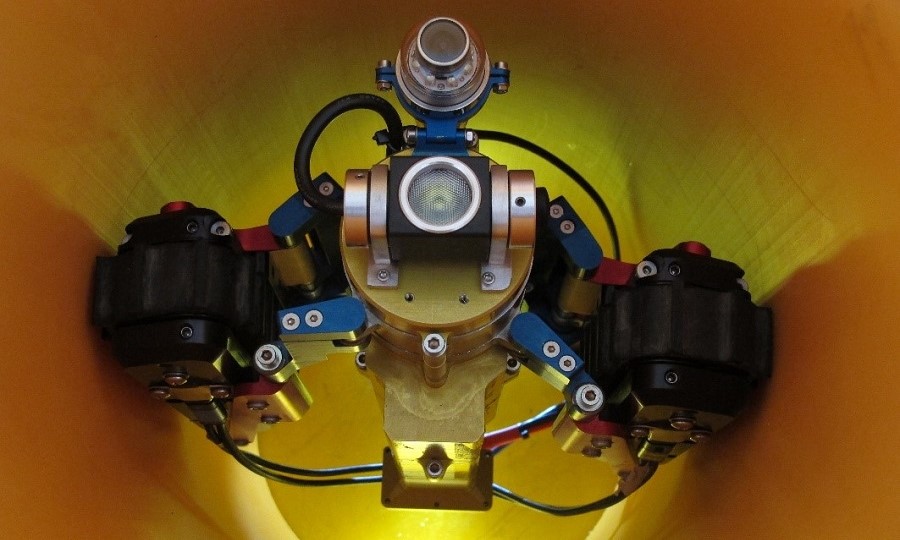
Rys. 2. Prototyp robota w czasie jazdy w rurociągu pionowym.
Na zakończenie warto podkreślić, że jednym z najtrudniejszych zadań dla prototypu robota
o dwóch napędach gąsienicowych jest ruch w rurociągach pionowych. Podczas testów sprawdzono działanie robota w rurociągu pionowym, dostosowując docisk gąsienic do ścian rury, co pokazano na rysunku 2. Autorska konstrukcja prototypu robota jest bardzo nowatorska, gdyż pozwala na ruch zarówno po powierzchniach płaskich w różnych obiektach, rurociągach poziomych, jak i pionowych, a dostępne na rynku rozwiązania stosowane mogą̨ być wyłącznie w jednym z wymienionych środowisk.
dr hab. inż. Mariusz Giergiel, prof. AGH, Michał Ciszewski
Katedra Robotyki i Mechatroniki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo – Hutnicza im. Stanisława Staszica w Krakowie